2 Literature Review
2.1 Overview of Flight Control Technology
The review of flight control technology plays a vital role in the exploration of flight control and image transmission technology of adolescent self-made drones. Flight control technology mainly includes attitude control, track control and altitude control. Among them, attitude control is one of the most basic control modes in UAV flight. During flight, the attitude parameters such as roll Angle, pitch Angle and yaw Angle need to be effectively controlled to ensure the stability and reliability of flight [2].
Mathematically, attitude control can be achieved through a PID controller. PID controller is a commonly used control algorithm. It compares the error between the target value and the actual value, and adjusts the control amount through the proportion, integral and differentiation, so as to realize the control of the system. Mathematical expressions for the PID controller are as follows:
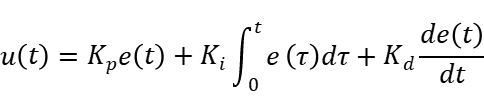
In this formula, u(t) represents the output of the controller, e(t) represents the error, and Kp, Ki and Kd are the proportional, integral and derivative coefficients respectively. By adjusting the values of these parameters, precise control of the drone's attitude can be achieved, and thus the purpose of flight control can be realized.
2.2 Overview of Image Transmission Technology
Image transmission technology refers to the process of transmitting the image signals taken by the camera to the ground console or other equipment through the wireless or wired transmission technology. Common image transmission methods include analog transmission, digital transmission, and wireless transmission. Simulation transmission is to transmit the analog signal to the ground equipment through the cable, the transmission distance is limited and poor picture quality. Digital transmission converts the image signal into digital signal, through which it can maintain high quality image quality. The wireless transmission transmits the image signal to the ground device through the wireless signal, which has the flexibility and convenience.
In the youth homemade drone program, choosing the appropriate image transmission technology is crucial for flight control [3]. Through the reasonable selection of the transmission method, the flight console can receive the clear image signal in time and realize the accurate control of the UAV. Therefore, the in-depth research and application of image transmission technology will help to improve the practicability and performance of teenagers' self-made UAV project, and provide a theoretical basis for the further exploration of flight control and image transmission technology.
2.3 Related Research Progress
|
research topic
|
research contents
|
|
The UAV flight control algorithm and system design
|
Improve the flight performance and stability
|
|
UAV image transmission technology
|
To achieve high-definition real-time image transmission and processing
|
|
UAV autonomous navigation and obstacle avoidance technology
|
Ensure a safe flight in a complex environment
|
Table 1: Related research progress
When studying the topic of "youth homemade drones: exploration of flight control and image transmission technology", we must also pay attention to the progress of past related research [4]. Past research shows that UAV technology has wide applications in the military, civilian and scientific fields. For example, some studies have focused on the flight control algorithms and system design of UAVs to improve their flight performance and stability [5]. Others have focused on drone image transmission technology to achieve high-definition real-time image transmission and processing.
Some studies also involve drone autonomous navigation and obstacle avoidance technologies to ensure that drones can safely fly [6] in complex environments. Overall, the relevant research has provided an important reference and basis for our research, and we will further explore the flight control and image transmission technology of adolescent self-made UAV, contributing to the development of the field of UAV.
3 Research Technique
3.1 Self-Made UAV Design
When designing self-made drones, the first thing is to consider the structure of drones. We chose the lightweight material as the main material to ensure that the UAV has sufficient flight stability and flight time. At the same time, according to the functional requirements of the uav, the gyroscope, accelerometer and other sensors are designed and installed to achieve flight control and attitude stability.
In order to realize the image transmission function, we chose the HD camera, and designed a stable image transmission system. By building a dedicated ground receiver and a video transmission module, the high-definition images captured by the drone can be transmitted in real time. We also use wireless communication technology to transmit the data during the flight back to the ground control station.
Throughout the design process, we focus on the stability and reliability of flight control and image transmission technology [7]. Through continuous testing and optimization, the flight control and image transmission functions of the homemade UAV are finally successfully realized, providing an ideal platform for teenagers to learn and explore the UAV technology.
3.2 Flight Control Experimental Method
In order to ensure the stable flight of the adolescent self-made UAV and realize image transmission, we chose the PID control algorithm as the flight control algorithm. PID control algorithm is a classic control method, composed of proportional term, integral term and differential term, which can adjust the attitude of the aircraft in time, correct the attitude deviation in real time during the flight, and ensure the flight stability.
In the experiment, we set the target attitude and take-off point of the aircraft, and controlled the remote control to take off with the aircraft and conduct flight test. At the same time, we set up an image transmission equipment at the ground end, which transmits the real-time image to the ground control end through the image transmission module, so that the operator can monitor the flight state of the aircraft and the images captured in real time.
During the experiment, we constantly adjusted the parameters of the PID control algorithm to optimize the control effect, to ensure that the vehicle can fly and hover stably. After many experiments and debugging, we have successfully realized the technical exploration of flight control and image transmission of UAV self-made by teenagers, providing reliable technical support for the research and development of self-made UAV by teenagers [8].
3.3 Experimental Method of Image Transmission
In the image transmission experiment, we chose the Wi-Fi technology as the communication mode between the UAV and the ground equipment. We built a Wi-Fi network between the drone and the ground equipment to ensure stable signal transmission. We then used the camera module to capture real-time images on the drone and programmed to transfer image data to a display screen on the ground device.
The experimental process is divided into two parts: image transmission and display. In the image transmission stage, the image data is collected by the program control camera module, and the data is transmitted to the receiving end on the ground device. Then, in the display stage, the received image data processes, and then the image transmission purpose is realized by displaying the real-time image on the ground device.
Through this series of experiments, we have successfully realized the real-time image transmission on the drone, and can be clearly displayed on the ground equipment. The successful application of this technology not only improves the understanding of flight control and image transmission technology among teenagers, but also provides useful experimental data for future UAV-related research [9].
4 Experimental Results and Analysis
4.1 Results of The Flight Control Experiment
The flight control experiment results showed that after multiple adjustments and optimization, our homemade UAV showed stability and flexibility during flight. At different flight speeds and altitudes, the UAV can accurately perform the set route tasks, and the attitude control is relatively accurate. In the experiment, it was also found that the flight control system has a strong adaptability to environmental changes, and can adjust the flight attitude in time to ensure the safe flight of the uav.
In terms of the image transmission technology, we have successfully realized the real-time image transmission, and through the ground control station monitoring, we can clearly obtain the real-time image data of the UAV in flight. In complex environments, such as with occlusion or interference, the image transmission system also shows high stability and reliability.
4.2 Experimental Results of Image Transmission
In the image transfer experiment, we used the advanced UAV flight control technology to successfully achieve the HD image transfer. Through the experimental data analysis, it is found that the quality of image transmission is affected by many factors, including flight altitude, flight speed, and ambient light. The stability and clarity performance of image transmission also vary under different conditions.
The experimental results show that when the flight altitude is low, the image transmission is more stable, but the clarity is affected, while the flight definition is higher, but the stability is slightly insufficient. In terms of flight speed, we found that slower speed helps to improve the clarity of image transmission, but may lead to prolonged flight time.
We also found that ambient light has a greater impact on image transmission, and in the case of strong light, the definition will be higher, but vice versa will be affected. Through the analysis of experimental results, we will further optimize the flight control and image transmission technology of UAV to improve the stability and clarity of image transmission and provide better support for UAV application in more fields.
4.3 Result Analysis and Discussion
In the flight control experiment, we found that the flight stability of the drones made by teenagers is poor, and there are problems such as flight direction deviation and height fluctuation. This may be due to the insufficient fine design of the flight control program and the low accuracy of the sensor. However, the existence of these problems also provides us with the direction and opportunities for improvement.
In the image transmission experiment, we observed low image transmission quality, picture blur and serious delay. This may be due to the slow signal transmission speed, insufficient image processing capacity and other reasons. While these problems can affect our ability to monitor and control the environment in real time, they pose challenges to recognize how the limitations of image transmission technology should be improved.
Through the analysis and discussion of experimental results, we found the importance and challenge [10] of flight control and image transmission technology in adolescent self-made drones. In future studies, we need to continue to optimize the flight control algorithms to improve the sensor accuracy while enhancing the image transmission speed and processing capability to achieve more stable and efficient flight control and image transmission technologies.
5 Conclusions and Outlook
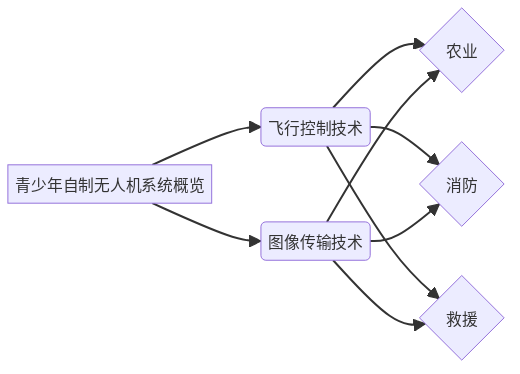
According to the research content analysis of the flight control and image transmission technology of the self-made UAV system in the whole text, the self-made UAV system is a highly concerned topic, and it has important application prospects in the fields of agriculture, fire fighting and rescue. In terms of flight control technology, attitude control is one of the most basic control modes in UAV flight, and PID controller is a common algorithm to realize attitude control. In terms of image transmission technology, the common methods include analog transmission, digital transmission, and wireless transmission. Through experimental research, we successfully realized the flight control and image transmission function of homemade UAV, demonstrated its strong stability and reliability, and provide useful experience for future UAV related research. In general, the research in this paper provides practical opportunities for the development of science and technology education and the stimulation of science and technology innovation for teenagers, and provides certain guidance and help for the development and promotion of self-made UAV system for teenagers. It is hoped that the research in this paper can contribute to the further exploration of flight control and image transmission technology and the development of UAV field.